
D4184 (модуль MOSFET), 1 канал, 36 В
Скидка 10%
В наличии
1 200 тг
1 080 тг
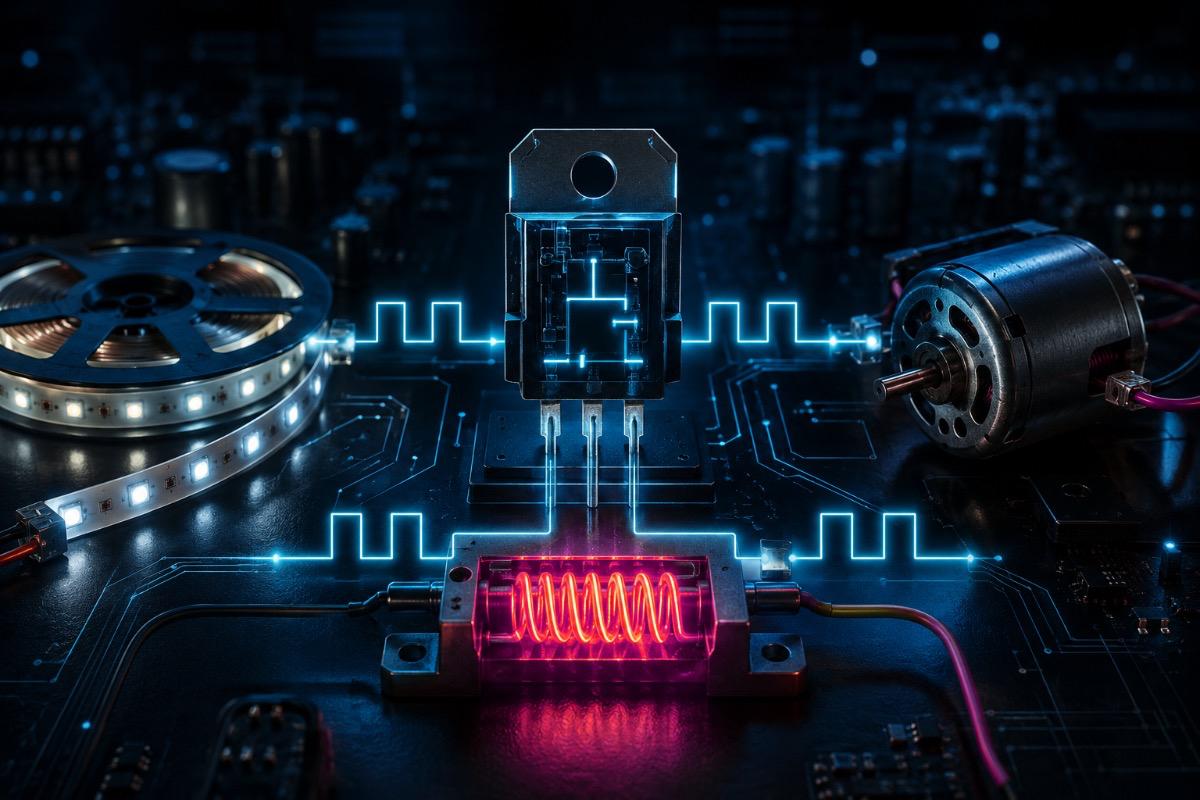
Как использовать ШИМ для управления светодиодной лентой, DC-мотором, вентилятором и нагревателем. Разбираем Arduino, ESP32, MOSFET, частоту PWM, питание нагрузки, нагрев ключа, помехи и примеры кода.
ШИМ используют там, где нагрузку нужно не просто включить или выключить, а управлять ее средней мощностью. Светодиодная лента может светить слабее или ярче, DC-мотор может вращаться медленнее или быстрее, вентилятор может менять обороты, а нагреватель может получать не постоянную, а дозированную подачу энергии.
Контроллер при этом не выдает “половину напряжения” в прямом смысле. Он быстро включает и выключает выход, меняя соотношение времени включения и выключения. Если нагрузка включена 20% времени, средняя мощность ниже. Если 80% времени - выше. Для многих нагрузок такой способ удобнее, чем линейное регулирование, потому что силовой ключ работает в режиме включено/выключено и меньше греется.
В статье про ШИМ сигнал можно рассматривать сам принцип PWM. Здесь важнее практическая часть: как управлять реальной нагрузкой, почему вывод Arduino или ESP32 нельзя нагружать напрямую, какой нужен MOSFET, что происходит с питанием и почему частота ШИМ влияет на поведение устройства.
ШИМ управляет не нагрузкой напрямую, а силовым ключом, который уже коммутирует ток светодиодной ленты, мотора, вентилятора или нагревателя.
Светодиодная лента - один из самых понятных примеров ШИМ управления. Если лента рассчитана на 12 В или 24 В, контроллер не должен питать ее напрямую. Arduino или ESP32 выдает только управляющий сигнал, а ток ленты проходит через MOSFET и отдельное питание.
Для одноцветной ленты обычно используют low-side включение: плюс ленты подключен к плюсу блока питания, минус ленты идет на сток MOSFET, исток MOSFET подключен к общему минусу. Затвор MOSFET управляется сигналом ШИМ от контроллера через небольшой резистор. Между затвором и землей часто ставят подтяжку, чтобы ключ оставался закрытым при перезагрузке контроллера.
Если лента потребляет несколько ампер, важны уже не только схема, но и провода, клеммы, дорожки, блок питания и охлаждение MOSFET. Даже хороший ШИМ не спасет от перегрева, если ключ выбран неправильно или питание разведено тонкими проводами.
Силовые ключи и драйверы в такой схеме определяют, будет ли управление лентой нормальным или MOSFET начнет работать как нагреватель. Для ESP32 особенно важно выбирать MOSFET, который открывается от 3.3 В на затворе.
const int ledPin = 9;
void setup() {
pinMode(ledPin, OUTPUT);
}
void loop() {
analogWrite(ledPin, 64); // около 25% яркости
delay(1000);
analogWrite(ledPin, 128); // около 50% яркости
delay(1000);
analogWrite(ledPin, 255); // 100% яркости
delay(1000);
}
Этот пример показывает только принцип изменения скважности. В реальной схеме пин Arduino должен идти на затвор MOSFET, а не на светодиодную ленту напрямую.
DC-мотор можно регулировать ШИМ сигналом, но он отличается от светодиодной ленты. У мотора есть индуктивность, пусковой ток, механическая инерция, щетки, помехи и нагрузка на валу. При низкой скважности мотор может не стартовать, а только гудеть или дергаться. При увеличении скважности он выходит на вращение и набирает скорость.
Для мотора также нужен силовой ключ. Если вращение нужно только в одну сторону, достаточно MOSFET в low-side схеме. Если нужно менять направление, нужен H-мост или готовый драйвер двигателя. Собирать H-мост из случайных транзисторов без понимания защиты и управления не стоит, потому что ошибка может привести к сквозному току и повреждению ключей.
При отключении мотора возникают выбросы и помехи. Нужна защита ключа, нормальное питание, конденсаторы рядом с мотором и разводка силовой части отдельно от датчиков и контроллера. Если мотор питается от 12 В, а контроллер от 5 В или 3.3 В, общий минус для управляющего сигнала обычно нужен, но силовой ток мотора не должен идти через плату контроллера.
Нагрев электродвигателя связан не только с самой нагрузкой, но и с режимом управления. При плохой частоте ШИМ, слабом питании или неверном ключе мотор может работать шумно, греться и создавать помехи.
Для света и некоторых моторов полезно не менять ШИМ резко, а делать плавный разгон или плавное изменение яркости. Это снижает резкие пусковые режимы, убирает неприятные скачки яркости и делает поведение устройства аккуратнее. Но такой прием не заменяет расчет силовой части. Если лента потребляет 5 А, MOSFET и блок питания все равно должны выдерживать эти 5 А при полной яркости.
Простой пример плавного изменения яркости на Arduino:
const int pwmPin = 9;
void setup() {
pinMode(pwmPin, OUTPUT);
}
void loop() {
for (int value = 0; value <= 255; value++) {
analogWrite(pwmPin, value);
delay(10);
}
for (int value = 255; value >= 0; value--) {
analogWrite(pwmPin, value);
delay(10);
}
}
Для мотора этот код не всегда подходит напрямую. У двигателя может быть минимальная скважность старта. Например, при значениях 20-40 он может не вращаться, а только потреблять ток. Поэтому для мотора часто задают минимальное рабочее значение или отдельный короткий стартовый импульс.
Нагреватель можно управлять ШИМ, но подход зависит от типа нагрузки и мощности. Для небольшого DC-нагревателя, питающегося от 12 В или 24 В, MOSFET может коммутировать питание с заданной скважностью. Нагреватель имеет тепловую инерцию, поэтому ему часто не нужна высокая частота ШИМ. Он не реагирует на каждый короткий импульс мгновенно, а усредняет мощность теплом.
Для сетевых нагревателей 220 В ситуация другая. Там нельзя просто подключить Arduino, MOSFET и нагрузку как в низковольтной схеме. Нужна развязка, твердотельное реле или другое решение, рассчитанное на сетевое напряжение и конкретную мощность. В такой схеме важны корпус, клеммы, изоляция, предохранитель, зазоры и безопасность обслуживания.
Для термостата часто достаточно не быстрого ШИМ, а управления по временным окнам. Например, в течение 10 секунд нагреватель включается на 3 секунды и выключается на 7 секунд. Это уже похоже на медленный PWM, но удобнее для инерционной тепловой нагрузки.
const int heaterPin = 8;
const unsigned long windowTime = 10000; // окно 10 секунд
const unsigned long onTime = 3000; // нагрев 3 секунды
unsigned long windowStart = 0;
void setup() {
pinMode(heaterPin, OUTPUT);
windowStart = millis();
}
void loop() {
unsigned long now = millis();
if (now - windowStart >= windowTime) {
windowStart = now;
}
if (now - windowStart < onTime) {
digitalWrite(heaterPin, HIGH);
} else {
digitalWrite(heaterPin, LOW);
}
}
Такой подход не подходит для всех нагрузок, но для медленных тепловых процессов он часто практичнее, чем высокая частота переключения.
MOSFET в ШИМ схеме должен быстро и достаточно полно открываться. Если он открыт не полностью, на нем падает заметное напряжение, а мощность превращается в тепло. При малом токе это может быть незаметно. При токе в несколько ампер корпус быстро нагревается.
Для Arduino с логикой 5 В выбор проще, но все равно нужно смотреть даташит. Для ESP32 с уровнем 3.3 В требования жестче. Нельзя ориентироваться только на Vgs(th). Этот параметр показывает начало открытия при малом токе, а не нормальную работу с нагрузкой. Для реальной схемы нужно смотреть Rds(on) при Vgs = 2.5 В, 3.3 В или 4.5 В.
В затвор обычно ставят небольшой резистор, например 50-220 Ом, чтобы ограничить импульсный ток заряда затвора и уменьшить звон. Между затвором и землей ставят подтяжку, например 10-100 кОм, чтобы MOSFET был закрыт при старте контроллера, сбросе или отключенном пине. Для мощных ключей, высокой частоты ШИМ или нескольких MOSFET может понадобиться драйвер затвора.
| Узел | Что проверить | Риск при ошибке |
|---|---|---|
| MOSFET | Rds(on) при нужном Vgs | Нагрев ключа |
| Затвор | Резистор и подтяжка | Случайное включение при старте |
| Питание нагрузки | Ток и просадка | Перезагрузка контроллера |
| Провода | Сечение и клеммы | Нагрев соединений |
| Частота ШИМ | Шум, нагрев, поведение нагрузки | Писк, помехи, потери |
MOSFET для ШИМ выбирают не по максимальному току в рекламе, а по реальному открытию, нагреву и условиям работы на плате.
Частота ШИМ влияет на шум, потери, поведение нагрузки и требования к ключу. Если частота слишком низкая, светодиодная лента может заметно мерцать, мотор может шуметь, а вентилятор - давать неприятный звук. Если частота слишком высокая, увеличиваются потери на переключение MOSFET, сильнее проявляются емкости затвора и требования к драйверу.
Для светодиодов часто выбирают частоту выше заметного мерцания. Для моторов и вентиляторов частоту подбирают по шуму, нагреву и стабильности вращения. Для нагревателей высокая частота обычно не нужна, потому что тепловая инерция сглаживает мощность.
На Arduino функция analogWrite использует частоты, зависящие от конкретной платы и таймера. На ESP32 управление ШИМ гибче: можно задавать частоту, разрешение и канал. Это удобно, но требует понимания компромисса: высокая частота уменьшает доступное разрешение при той же аппаратной базе.
Пример настройки ШИМ на ESP32:
const int pwmPin = 18;
const int pwmChannel = 0;
const int pwmFrequency = 20000;
const int pwmResolution = 8;
void setup() {
ledcSetup(pwmChannel, pwmFrequency, pwmResolution);
ledcAttachPin(pwmPin, pwmChannel);
}
void loop() {
ledcWrite(pwmChannel, 64); // около 25%
delay(1000);
ledcWrite(pwmChannel, 128); // около 50%
delay(1000);
ledcWrite(pwmChannel, 255); // 100%
delay(1000);
}
Для ESP32 частота 20 кГц часто используется, чтобы уйти выше слышимого диапазона, но она не всегда оптимальна. Нужно проверять конкретный MOSFET, нагрузку и нагрев.
ШИМ управление часто ломается не из-за кода, а из-за питания. Контроллер работает от 5 В или 3.3 В, а нагрузка может питаться от 12 В, 24 В или другого источника. При включении нагрузки блок питания проседает, по земле идет импульсный ток, датчики начинают показывать мусор, а контроллер может перезагрузиться.
Правильнее разделять силовой и логический путь. Питание нагрузки идет отдельными проводами нужного сечения. Контроллер получает свою стабильную линию через DC-DC преобразователь или стабилизатор. Общий минус между контроллером и MOSFET обычно нужен, но силовой ток не должен возвращаться через тонкую землю платы контроллера.
Если нагрузка мощная, возле нее и возле ключа могут понадобиться конденсаторы. Для мотора или реле нужна защита от выбросов. Для светодиодной ленты важен запас блока питания и подвод питания к ленте, особенно если она длинная. Для нагревателя важны клеммы, провода и тепловой режим.
DC-DC преобразователь в реальном устройстве помогает отделить питание логики от силовой части, но сам преобразователь тоже должен выдерживать ток контроллера, датчиков и интерфейсов.
Плавный старт полезен для светодиодной ленты, вентилятора, DC-мотора и некоторых других нагрузок. Он снижает резкий бросок тока, делает поведение устройства аккуратнее и уменьшает механический рывок. Но плавный старт не отменяет пусковой ток полностью. Блок питания и ключ все равно должны выдерживать максимальный режим.
Пример плавного старта для MOSFET-ключа на Arduino:
const int loadPin = 9;
void setup() {
pinMode(loadPin, OUTPUT);
}
void loop() {
for (int power = 0; power <= 200; power += 5) {
analogWrite(loadPin, power);
delay(30);
}
delay(5000);
analogWrite(loadPin, 0);
delay(3000);
}
В этом примере максимальное значение ограничено 200, а не 255. Такой прием можно использовать, если нагрузке не нужна полная мощность. Но ограничение скважности должно быть осознанным: для мотора слишком низкое значение может привести к плохому старту, а для ленты - просто к меньшей яркости.
При ШИМ управлении греется не только нагрузка. MOSFET может греться из-за сопротивления открытого канала, слабого открытия затвора, высокой частоты переключения, плохой платы или недостаточного охлаждения. Провода и клеммы греются из-за тока, плохого контакта или малого сечения. Блок питания греется, если работает на пределе.
Нагрев нужно проверять в длительном режиме. Короткий тест на столе не показывает, что будет через 20 минут работы в корпусе. Если MOSFET теплый при 30% мощности, при 100% он может быть уже слишком горячим. Если клемма теплая, нужно проверить затяжку, ток и сечение провода. Если блок питания проседает при включении нагрузки, код ШИМ это не исправит.
Мощность элементов в цепи нагрузки показывает тот же принцип: если через элемент идет ток и на нем падает напряжение, появляется тепло. Для MOSFET это особенно важно, потому что плохой выбор ключа может визуально работать, но терять энергию на нагрев.
Нормальная ШИМ схема проверяется не только мультиметром, но и температурой ключа, проводов, клемм и блока питания.
ШИМ управление нужно проверять с той нагрузкой, которая будет работать в устройстве. Светодиодная лента, мотор, вентилятор и нагреватель ведут себя по-разному. Нельзя проверить схему на маленьком светодиоде, а потом подключить мотор и считать результат предсказуемым.
Минимальная проверка:
Если при включении нагрузки контроллер перезагружается, причина часто находится в питании, земле или пусковом токе. Если MOSFET греется, нужно проверять открытие затвора, тип ключа, ток нагрузки и частоту ШИМ. Если мотор пищит, нужно менять частоту или режим управления. Если светодиодная лента мерцает, частота может быть слишком низкой или питание нестабильным.
ШИМ управление удобно, но оно не является только программной функцией. В реальном устройстве это связка кода, MOSFET, частоты, питания, проводов, защиты и нагрузки. Если один из этих элементов выбран неправильно, схема может работать нестабильно, греться или создавать помехи.
Для светодиодной ленты важны ток, блок питания и MOSFET. Для DC-мотора - пусковой ток, выбросы, частота и защита. Для вентилятора - старт, шум и стабильность оборотов. Для нагревателя - мощность, тепловая инерция и безопасность коммутации. Один и тот же код analogWrite не делает эти нагрузки одинаковыми.
Хорошая ШИМ схема начинается не с функции в Arduino IDE, а с понимания нагрузки. Сначала нужно определить ток, напряжение, характер нагрузки и режим работы. Затем выбрать силовой ключ, питание, защиту и частоту. После этого код становится уже последним слоем управления, а не попыткой исправить ошибки железа.
В наличии
1 200 тг
1 080 тг

В наличии
680 тг
612 тг

В наличии
4 500 тг
4 050 тг

В наличии
2 600 тг
2 340 тг
Комментарии (0)