Калибровка датчиков в автоматике: почему показания в проекте отличаются от реальности
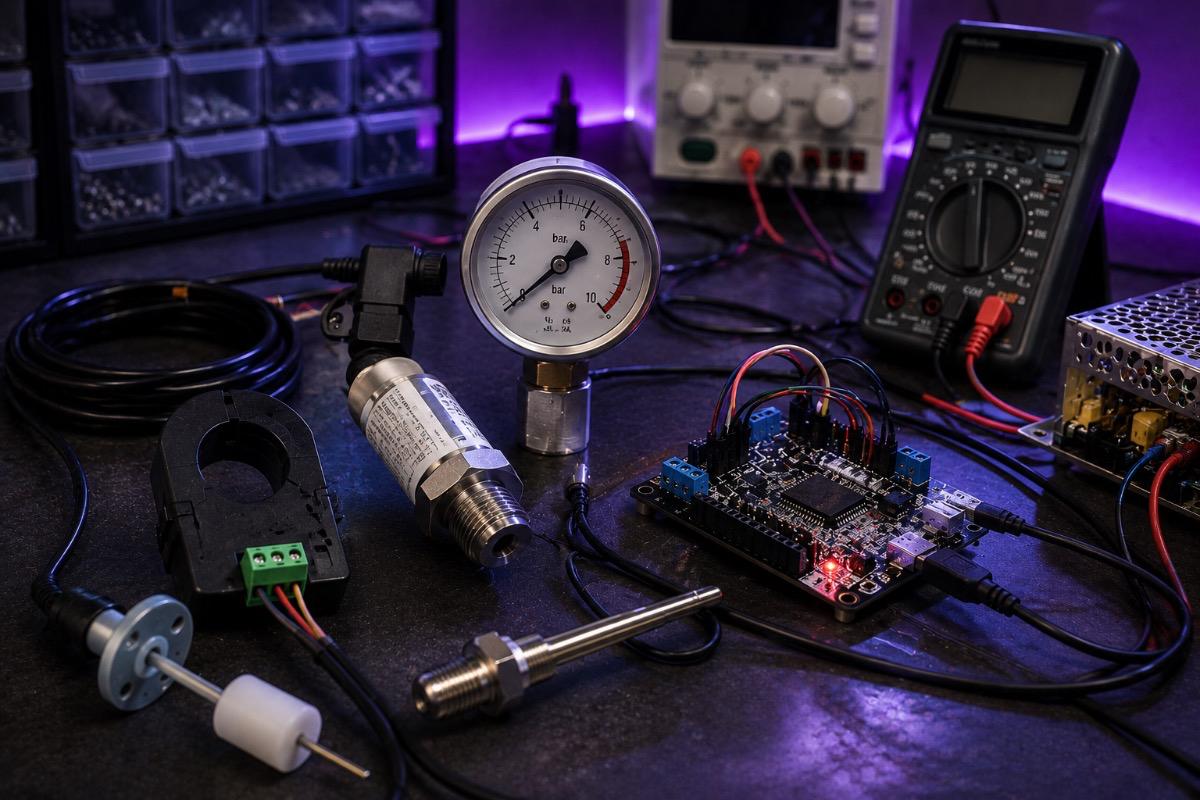
Датчики температуры, давления, тока, уровня и влажности редко показывают идеальные значения сразу после подключения. Разбираем ноль, смещение, коэффициент, шум, фильтрацию, калибровку и ошибки измерений в Arduino, ESP32 и автоматике.
Если датчик подключен правильно, но цифры все равно странные
На столе все выглядит просто: подключили датчик, открыли монитор порта, увидели число. Потом ставим устройство на объект, и начинается: температура выше реальной на пару градусов, ток прыгает около нуля, давление не совпадает с манометром, уровень воды дергается, влажность живет своей жизнью.
Это не всегда ошибка датчика. Часто проблема в калибровке, питании, месте установки, шуме, плохой земле, длинных проводах или неправильном пересчете значения.
Датчик не выдает "истину". Он выдает сигнал. А уже программа превращает этот сигнал в градусы, амперы, бары, проценты или миллиметры. Если этот пересчет сделан грубо, итоговые показания будут выглядеть красиво, но не будут совпадать с реальностью.
Особенно это заметно в проектах на Arduino, ESP32 и похожих платах, где к одному контроллеру подключают датчики, реле, насосы, вентиляторы и питание от разных источников.
Сначала проверяют ноль
Самая частая проблема измерений - смещение нуля. Датчик тока показывает 0.18 А без нагрузки. Датчик давления показывает не ноль на открытой линии. Аналоговый вход показывает небольшое значение, хотя сигнал вроде отключен.
Если это не учесть, вся автоматика начинает принимать решения с ошибкой. Например, насос выключен, а программа считает, что ток уже есть. Или давления нет, но на экране отображается небольшое положительное значение.
Сначала нужно понять, что показывает датчик в спокойном состоянии:
- датчик тока без нагрузки;
- датчик давления без давления;
- датчик уровня в пустой емкости;
- датчик влажности в известных условиях;
- аналоговый вход при стабильном опорном сигнале.
После этого в программе можно вычитать смещение. Это простая операция, но она часто делает показания намного ближе к реальности.
Смещение и коэффициент
Во многих проектах достаточно двух настроек: смещения и коэффициента.
Смещение отвечает за ошибку около нуля. Например, без нагрузки датчик показывает 0.12 А. Значит это значение нужно вычесть.
Коэффициент отвечает за масштаб. Например, реальное давление 2.0 бара, а программа показывает 1.8. Значит пересчет нужно немного поправить.
Простая формула выглядит так:
float corrected = (rawValue - offset) * scale;
Где rawValue - исходное значение, offset - смещение нуля, scale - коэффициент пересчета.
Это не лабораторная метрология, но для самодельной автоматики такой подход часто достаточен. Главное - не верить первому числу с датчика как готовому результату.
Влияние питания на показания
Если датчик питается от нестабильной линии, показания могут плавать даже при неизменном физическом параметре. Особенно это касается аналоговых датчиков и схем, где измерение зависит от питания контроллера.
Например, включилось реле, просела линия 5 В, изменилось значение на аналоговом входе. Или стартовал насос, в цепи появились помехи, и датчик давления начал дергаться. В программе это выглядит как реальное изменение, хотя причина в питании.
Поэтому чувствительные датчики лучше не питать от той же линии, где сидят реле, моторы, клапаны и подсветка. Землю тоже нужно разводить аккуратно: силовой ток нагрузки не должен идти через тонкую землю датчика.
Про скачущие аналоговые значения уже есть отдельная статья Аналоговый вход микроконтроллера: почему показания скачут и как их стабилизировать. Калибровка не спасет, если сама электрическая часть шумит.
Среднее значение не всегда решает проблему
Когда показания прыгают, первое желание - усреднить. Считать 10, 20 или 100 измерений и вывести среднее. Иногда это помогает, но не всегда.
Если шум случайный и небольшой, среднее действительно сглаживает картину. Но если датчик ловит помехи от реле, если питание проседает, если провод плохо зажат или сигнал периодически обрывается, среднее просто замазывает проблему.
Есть разница между шумом и неисправностью. Шум можно фильтровать. Обрыв, плохой контакт и просадки питания нужно устранять.
Для температуры можно спокойно сглаживать показания. Для защиты насоса по давлению или току фильтр должен быть аккуратнее: слишком сильное сглаживание задержит реакцию на аварию.
Быстрые датчики и медленные процессы
Не каждый параметр нужно измерять очень часто. Температура помещения меняется медленно. Влажность тоже не скачет каждую миллисекунду. Давление в системе может меняться быстрее. Ток двигателя при старте меняется резко.
Если опрашивать медленный датчик слишком часто и реагировать на каждую мелочь, автоматика получается нервной. Вентилятор включается и выключается слишком часто, реле щелкает около порога, на экране постоянно пляшут цифры.
Лучше подбирать частоту измерения под задачу:
| Параметр | Как обычно ведет себя | Что важно |
|---|---|---|
| Температура воздуха | Меняется медленно | Сглаживание и правильное место установки |
| Влажность | Может меняться локально | Не ставить датчик рядом с паром или водой |
| Давление | Может меняться быстро | Следить за ростом после запуска насоса |
| Ток двигателя | Есть пусковой скачок | Не считать стартовый пик аварией |
| Уровень воды | Зависит от типа датчика | Фильтровать всплески и дребезг |
Одинаковый фильтр для всех датчиков - плохая идея. У температуры, тока и давления разные задачи.
Калибровка по одной точке и по двум точкам
Калибровка по одной точке подходит, когда нужно убрать смещение. Например, датчик тока без нагрузки должен показывать ноль. Измерили ошибку, записали offset, вычли его в программе.
Калибровка по двум точкам нужна, когда важен масштаб. Например, датчик давления проверяют на 0 бар и на 2 бара по манометру. После этого можно поправить и ноль, и коэффициент.
Для температуры можно сравнить показания с нормальным термометром в одной точке, но это не гарантирует точность во всем диапазоне. Для серьезных измерений нужны несколько точек. Для бытовой автоматики часто хватает разумной проверки в рабочем диапазоне.
Главное - калибровать в тех условиях, где устройство будет работать. Если датчик проверяли на столе, а потом поставили в горячий шкаф рядом с блоком питания, результат может измениться.
Внешний АЦП для слабых и точных сигналов
Встроенный аналоговый вход микроконтроллера не всегда удобен для точных измерений. У ESP32, например, аналоговые входы часто требуют аккуратной настройки, стабильного питания и проверки диапазона.
Если нужно измерять слабые сигналы, небольшие изменения напряжения или несколько аналоговых каналов с лучшей стабильностью, используют внешний АЦП. Например, ADS1115 подключается по I2C и дает более удобную основу для измерений, чем сырой аналоговый вход в некоторых проектах.
Это не магическое улучшение всего подряд. Если датчик шумит, питание плохое, земля разведена неправильно, а провода идут рядом с мотором, внешний АЦП тоже будет видеть проблемы. Но при нормальной схеме он помогает сделать измерение аккуратнее.
Датчик тока
Датчики тока часто требуют калибровки нуля. Например, модуль ACS712 может показывать небольшое значение даже без нагрузки. Это нормально для таких измерений, если смещение учитывается в программе.
Для контроля насоса или мотора важно не только абсолютное значение тока, но и поведение во времени. При старте ток выше. После разгона он должен выйти на рабочий уровень. Если ток слишком высокий после задержки - возможна перегрузка. Если слишком низкий - нагрузка может быть отсутствующей или насос работает не в нормальном режиме.
Поэтому датчик тока лучше калибровать в нескольких состояниях: без нагрузки, при нормальной работе и при известной нагрузке, если это возможно.
Датчик давления и реальный манометр
Датчик давления лучше проверять по обычному манометру, а не только по расчету из документации. В реальной системе есть питание, проводка, разъемы, механическая установка, резьбы, переходники и возможные пульсации давления.
Если автоматика управляет насосом, важно знать не просто красивое число на экране, а совпадает ли оно с реальным давлением в системе.
В проектах с водой датчик давления часто связан с защитой насоса, контролем утечек и аварийным отключением. Про саму логику защиты мы уже говорили в статье Мониторинг насоса: давление, ток, сухой ход и аварийная остановка.
Калибровку давления лучше делать в рабочем диапазоне. Если система обычно работает около 2-3 бар, именно там и нужно проверять точность.
Настройки калибровки
На этапе сборки удобно вписать offset и scale прямо в код. Но если устройство ставится на объект, лучше предусмотреть возможность менять эти значения без перепрошивки.
Датчик могут заменить. Провод может стать длиннее. Блок питания может быть другим. Механическая установка может измениться. После этого старые коэффициенты уже не подходят.
Настройки калибровки можно хранить в памяти контроллера, во внешней памяти, на сервере или задавать через сервисное меню. Главное - не превращать каждую мелкую поправку в новую прошивку.
Проверка перед установкой
Перед установкой лучше проверить не только "датчик отвечает", а весь измерительный канал.
Что стоит посмотреть:
- значение без нагрузки или без давления;
- значение в нормальном рабочем режиме;
- реакцию на включение реле и моторов;
- поведение при длинном проводе;
- стабильность питания;
- совпадение с ручным прибором;
- поведение после перезагрузки;
- сохранение калибровочных настроек;
- реакцию программы на обрыв датчика.
Хорошая калибровка не делает дешевый датчик лабораторным прибором. Она просто убирает грубые ошибки и делает показания пригодными для автоматики. А для большинства проектов это как раз то, что нужно: не идеальная цифра, а стабильное и понятное решение для управления.
Комментарии (0)