Автополив на Arduino: насос, датчик влажности и защита от сухого хода
Как устроить автополив на Arduino: датчик влажности почвы, насос, реле или MOSFET, питание, бак с водой, защита от сухого хода, ручной режим и проверка системы перед установкой.
Автополив как небольшая система
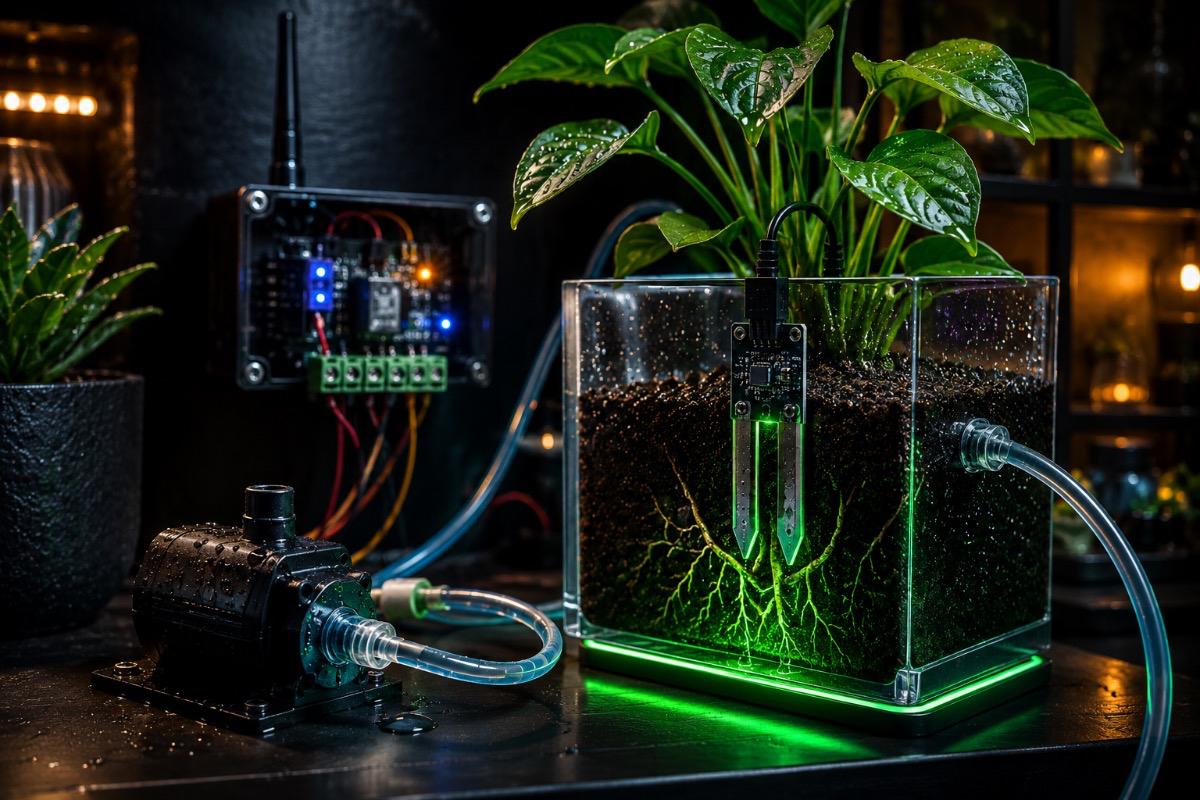
Автополив на Arduino часто начинают с простой идеи: датчик влажности почвы показал сухо - насос включился, показал влажно - насос выключился. На столе такая схема выглядит понятной, но в реальной установке быстро появляются детали: бак может остаться без воды, насос берет пусковой ток, датчик окисляется в земле, провода становятся длиннее, питание проседает, а растение не всегда нужно поливать сразу после одного случайного измерения.
Поэтому автополив лучше рассматривать как небольшую систему. В ней есть контроллер, датчик влажности, исполнительная часть, насос, питание, бак или источник воды, защита от аварийного режима, индикация и ручное управление. Если один из этих узлов сделан слабо, вся система начинает работать непредсказуемо.
Arduino в таком проекте удобна как простой контроллер логики. Она может читать датчик, сравнивать показания с порогом, включать насос на заданное время, делать паузу между поливами и показывать состояние. Но сама Arduino не должна напрямую питать насос или тяжелую нагрузку. Для этого нужен отдельный ключ: реле, MOSFET или готовый модуль управления.
Автополив должен принимать решение не по одному мгновенному числу датчика, а по понятному условию: влажность ниже порога, вода в баке есть, насос исправен, питание выдерживает запуск.
Датчик влажности почвы в земле
Датчик влажности почвы работает в сложной среде. Земля неоднородна: сверху она может быть сухой, глубже влажной, возле корня одна картина, возле края горшка другая. После полива вода распределяется не сразу. Если датчик стоит слишком близко к капельнице, он быстро покажет влажность, хотя большая часть грунта еще сухая. Если датчик стоит слишком далеко, насос будет работать дольше, чем нужно.
Простые резистивные датчики влажности почвы недорогие, но у них есть слабое место: металлические электроды находятся в земле и со временем окисляются. Постоянная подача питания на такой датчик ускоряет износ. Поэтому его лучше включать только на время измерения, если схема это позволяет. Емкостные датчики обычно живут лучше, потому что не измеряют влажность прямым током через землю, но они тоже требуют калибровки под конкретный грунт.
Порог влажности нельзя брать универсальным. Один грунт держит воду долго, другой быстро просыхает. Горшок, теплица, ящик с рассадой и открытая грядка ведут себя по-разному. Поэтому систему нужно настроить на месте: измерить показания в сухом состоянии, после нормального полива и через несколько часов после распределения влаги.
Калибровка датчиков в автополиве особенно важна, потому что контроллер работает не с “влажностью вообще”, а с конкретным датчиком, конкретной землей и конкретным местом установки.
Насос и пусковой ток
Насос в автополиве может быть маленьким, но для схемы питания он все равно остается нагрузкой с пусковым током. При включении двигатель кратковременно берет больше тока, чем в установившемся режиме. Если блок питания слабый, напряжение проседает, Arduino может перезагрузиться, а насос не выйти на нормальный режим. На столе это иногда выглядит как случайный сбой: плата мигает, реле щелкает, насос дергается и система начинает цикл заново.
Питание насоса лучше отделять от питания контроллера. Это не обязательно два разных адаптера, но ток насоса должен идти отдельным силовым путем, а не через тонкие дорожки платы Arduino или макетные провода. Общий минус между контроллером и ключом обычно нужен, но силовой ток насоса не должен возвращаться через землю аналогового датчика или логической части.
Если насос питается от 5 В, 12 В или 24 В, нужно смотреть не только напряжение, но и ток. В характеристиках насосов производительность лучше оценивать в куб/час, а электрическую часть - по рабочему току, пусковому току и допустимому режиму работы. Маленький насос может быть рассчитан на кратковременное включение, а не на постоянную работу.
Для питания от 12 В или 24 В часто удобно использовать преобразователи питания: одна линия питает насос, а отдельный DC-DC модуль делает 5 В для Arduino и датчиков. Это надежнее, чем пытаться питать все через линейный стабилизатор на плате контроллера.
| Узел | Что проверить | Что будет при ошибке |
|---|---|---|
| Насос | Рабочий и пусковой ток | Просадка питания и перезапуск контроллера |
| Блок питания | Запас по току | Насос не стартует или работает рывками |
| Провода питания | Сечение и длина | Падение напряжения на проводе |
| Общий минус | Путь силового тока | Помехи в датчике и логике |
| DC-DC модуль | Ток 5 В линии | Нестабильное питание Arduino |
Реле или MOSFET для включения насоса
Arduino не должна включать насос напрямую с вывода. GPIO рассчитан на логический сигнал, а не на питание двигателя. Для включения насоса нужен исполнительный элемент. Чаще всего выбирают реле или MOSFET.
Реле удобно тем, что оно электрически отделяет контактную часть от управляющей логики и может коммутировать разные напряжения. Оно понятно по подключению, но щелкает, имеет механический ресурс и требует защиты катушки. Если используется модуль реле, нужно проверить питание катушки, входной уровень, наличие оптопары, общую землю и защитный диод.
MOSFET лучше подходит для частого включения, компактной платы и постоянного тока. Он не щелкает и не имеет механических контактов. Но MOSFET нужно выбирать по току, сопротивлению открытого канала, логическому уровню затвора и нагреву. Не каждый MOSFET нормально открывается от 5 В, тем более от 3.3 В.
Если насос постоянного тока, рядом с ним желательно предусмотреть защиту от выбросов. При отключении двигателя возникают помехи, которые могут попасть в питание, ключ или контроллер. В зависимости от схемы используют диод, TVS, RC-цепь, конденсатор возле двигателя и правильную разводку питания. Диод в цепи питания и защиты платы нужен не как формальность, а как часть защиты ключа и контроллера от индуктивной нагрузки.
Выбор между реле и MOSFET зависит не от привычки, а от насоса, частоты включений, напряжения, тока и требований к ресурсу.
Защита от сухого хода
Сухой ход - один из главных рисков автополива. Если в баке закончилась вода, насос продолжит работать без нормальной подачи. Для некоторых насосов это быстро приводит к перегреву, износу или повреждению. Даже если насос переживет такой режим, система не выполнит задачу: растение не получит воду, а контроллер будет считать, что полив был сделан.
Защиту можно реализовать разными способами. Самый простой вариант - датчик уровня воды в баке. Это может быть поплавковый датчик, геркон с магнитом, электродный датчик, оптический датчик или другой подходящий узел. Если воды нет, Arduino не включает насос и показывает ошибку. Такой подход понятен и надежен, если датчик уровня установлен правильно.
Второй вариант - контроль тока насоса. При сухом ходе ток может изменяться, но это зависит от конкретного насоса. Такой способ требует датчика тока и настройки порогов, зато позволяет видеть не только отсутствие воды, но и заклинивание, перегрузку или обрыв. Для простого автополива обычно достаточно датчика уровня, а контроль тока имеет смысл в более серьезной системе.
Третий уровень защиты - ограничение времени работы. Например, насос не может работать дольше 20-30 секунд за один цикл. Если влажность после полива не изменилась, система не должна бесконечно включать насос. Она должна перейти в ошибку или ждать ручной проверки. Это защищает от оборванного шланга, пустого бака, неисправного датчика влажности или забитой линии.
Защита насоса от сухого хода в автополиве нужна даже для небольшой системы, потому что насос работает без постоянного наблюдения человека. Автоматика должна учитывать не только нормальный полив, но и отказовые состояния.
Логика полива без лишних включений
Плохая логика автополива включает насос каждый раз, когда показание датчика чуть ниже порога. В реальности датчик может шуметь, земля может менять влажность медленно, а вода после полива доходит до датчика с задержкой. Если включать насос сразу после каждого низкого значения, система будет часто дергать нагрузку и переливать грунт.
Лучше использовать несколько условий. Например, влажность должна быть ниже порога не один раз, а несколько измерений подряд. После включения насоса нужно сделать полив ограниченной длительности, затем паузу, чтобы вода распределилась. Только после паузы есть смысл снова читать датчик и решать, нужен ли следующий цикл.
Полезна разница между порогом включения и порогом возврата. Например, насос включается при влажности ниже 35%, а повторный полив разрешается только после того, как система проверила состояние через заданное время. Это не совсем гистерезис в классическом виде, но логика похожая: не реагировать на мелкие колебания около порога.
Ручной режим тоже нужен. Иногда нужно включить полив независимо от датчика: после пересадки, промывки системы, проверки насоса или настройки. Но ручной режим должен иметь ограничение по времени, иначе он станет обходом защиты.
Минимальная логика может выглядеть так:
- измерить влажность несколько раз;
- усреднить или отфильтровать значения;
- проверить, есть ли вода в баке;
- если влажность ниже порога, включить насос на короткое время;
- выключить насос;
- сделать паузу на распределение воды;
- снова измерить влажность;
- при повторной ошибке перейти в ожидание или показать предупреждение.
Автополив должен работать циклами, а не пытаться держать влажность мгновенным включением и выключением насоса.
Индикация и состояние системы
В автополиве полезно сразу видеть состояние системы. Один светодиод может показывать питание, второй - работу насоса, третий - ошибку воды или датчика. Если есть дисплей, можно выводить влажность, порог, состояние бака и время последнего полива. Без индикации неисправность часто выглядит одинаково: растение сухое, насос молчит, а причина неизвестна.
Минимальная индикация особенно важна, если устройство стоит в теплице, на подоконнике, в техническом помещении или рядом с баком. Пользователь должен понимать, что происходит: система ждет, поливает, нет воды, датчик не подключен, насос заблокирован, питание нестабильно.
Светодиодная индикация в таком проекте не украшение, а способ быстро отличить нормальный режим от аварийного. Если система работает без экрана, цвет и режим мигания должны быть простыми: питание, полив, ошибка.
Хорошая индикация экономит время при настройке. Без нее приходится каждый раз подключать компьютер, открывать монитор порта и гадать, почему насос не включился.
Провода, влажность и корпус
Автополив работает рядом с водой, влажной землей и длинными проводами. Поэтому корпус и соединения важны не меньше программы. Arduino и силовая часть не должны лежать рядом с баком без защиты. Клеммы насоса, датчика и питания должны быть закреплены. Провода не должны натягиваться, попадать под воду или держаться только на макетных перемычках.
Датчик влажности находится в земле, а контроллер часто в сухой зоне. Между ними идет провод, который может ловить помехи и окисляться в месте соединения. Если провод длинный, полезно использовать нормальный кабель, фиксировать соединения и защищать вход контроллера. Если насос находится отдельно, его силовые провода лучше вести отдельно от сигнального провода датчика.
Корпус должен учитывать обслуживание. Нужно иметь доступ к кнопке ручного полива, разъему питания, клеммам насоса и датчику уровня воды. Если для замены датчика нужно разбирать всю систему, обслуживание быстро станет неудобным.
Для нормальной сборки лучше уйти от макетной платы и временных проводов. Макетка хороша для проверки идеи, но в устройстве рядом с водой и насосом нужны пайка, клеммы, разъемы, фиксация проводов и понятное размещение платы. Корпус для электронного устройства в таком проекте защищает не только плату, но и саму логику работы системы.
Проверка автополива перед установкой
Перед установкой автополив нужно проверить не только в режиме “насос включился”. Система должна пройти нормальный полив, пустой бак, отключенный датчик, влажную землю, сухую землю, просадку питания и ручной режим. Именно эти ситуации покажут, готова ли схема работать без постоянного наблюдения.
Сначала проверяют электрическую часть без воды: питание Arduino, питание насоса, работу ключа, состояние датчика уровня, индикацию и ручной режим. Затем подключают насос к воде и проверяют фактическую подачу. Важно убедиться, что шланг не перегибается, вода не течет на плату, насос не работает слишком долго, а после выключения вода не продолжает самотеком заливать грунт.
После этого проверяют датчик влажности в реальной земле. Нужно посмотреть сухое значение, влажное значение и поведение после паузы. Если датчик стоит слишком близко к месту подачи воды, система может выключаться слишком рано. Если слишком далеко, будет перелив. Иногда правильнее изменить место датчика, чем бесконечно менять порог в программе.
Минимальная проверка:
- питание контроллера без насоса;
- запуск насоса отдельно от логики;
- включение насоса через реле или MOSFET;
- просадка питания при старте;
- работа датчика влажности в сухой земле;
- работа датчика после полива;
- пауза после полива и повторное измерение;
- пустой бак и запрет включения насоса;
- ограничение максимального времени полива;
- ручной режим с ограничением;
- работа индикации ошибки;
- проверка проводов и корпуса рядом с водой.
Когда проект стоит усложнять
Базовый автополив может быть очень простым: Arduino, датчик влажности, насос, ключ, датчик уровня воды и индикация. Этого достаточно для горшка, небольшого ящика с рассадой или простого стенда. Но если система обслуживает теплицу, несколько зон или дорогие растения, проект стоит усложнять постепенно.
Первое полезное усложнение - несколько зон полива. Тогда у каждой зоны может быть свой клапан или насос, свой датчик и свой график. Второе - расписание, чтобы полив не происходил в неудобное время. Третье - контроль расхода воды или датчик протока, чтобы видеть, что вода действительно идет. Четвертое - журнал событий: когда был полив, сколько длился, была ли ошибка бака.
Для удаленных объектов можно добавить связь: Wi-Fi, RS-485, GSM или другой канал. Но связь не должна быть единственным способом управления. Даже без интернета автополив должен безопасно остановиться при пустом баке и не включать насос бесконечно.
Умная теплица на ESP32 уже относится к более широкой системе: там кроме полива появляются вентиляция, климат, связь и управление несколькими параметрами. Автополив на Arduino лучше начинать с надежного базового узла, а не сразу превращать в сложную систему.
Сложность стоит добавлять только после того, как базовый полив стабильно работает с водой, датчиком, насосом и защитой.
Автополив как полезный проект для проверки электроники
Автополив на Arduino хорош тем, что в нем сразу видны реальные проблемы электроники. Здесь есть датчик, аналоговое измерение, силовая нагрузка, вода, питание, провода, корпус, ручной режим и аварийные состояния. Такой проект быстро показывает разницу между схемой на столе и устройством, которое должно работать несколько дней подряд.
Если сделать только датчик и насос, система будет простой, но ненадежной. Если добавить защиту от сухого хода, ограничение времени, нормальное питание, индикацию и проверку в земле, проект становится уже не игрушечной схемой, а небольшим рабочим устройством.
Хороший автополив не пытается угадывать состояние растения по одному числу. Он проверяет условия, включает насос ограниченно, ждет распределения воды, контролирует бак и показывает ошибку, если что-то пошло не так. Именно такая логика делает проект полезным, а не просто демонстрацией Arduino и датчика влажности.
Комментарии (0)